# LSA1
# Overview
**LSA1** linear motorized actuator designed for automated DOF stacking photography and other precision automated tasks. Can be connected to 4 channel [SCE2-MOTION](https://www.kurokesu.com/shop/motion_systems) controller over standard RJ45 cable.
[](https://wiki.kurokesu.com/uploads/images/gallery/2021-02/IMG_0589_r_.jpg)
- Anodized CNC machined aluminum construction
- Arca-Swiss compatible quick release base
- Multiple 1/4" mounting holes
- 90mm travel length
- Precision homing position with hall sensor
- Multiple lead screw options: 0.635mm, 1.27mm, ...
- Precision linear guideways with light preload# Specifications
#### LSA1 specifications
| **Feature** | **Value** | **Units** |
| Travel length | 90 | mm |
| Max drive speed | 500 | mm/min |
| Lead screw options | - 0.635
- 1.27
- 6.35
| mm |
| Static load | >200 | N |
| Push/pull force | >50 | N |
| Weight | 517 | g |
#### Notes
Homing position at 11mm (for pinch safety, but after homing zero position can be driven to -11mm)
# Dimensions
#### External dimensions
LSA1 external dimensions \[mm\]: 204.5 x 60 x 31
[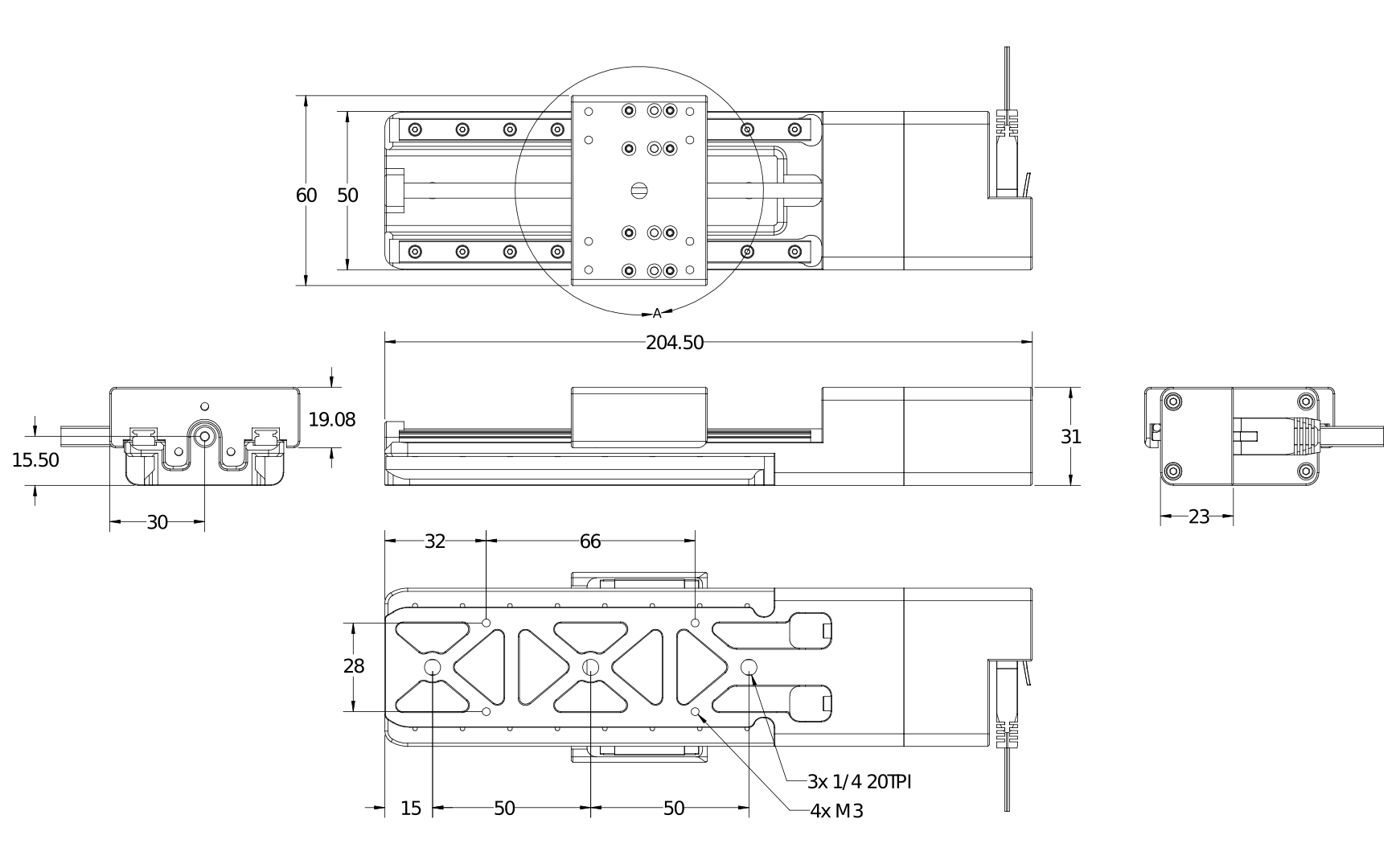](https://wiki.kurokesu.com/uploads/images/gallery/2020-08/LSA1_dimensions.png)
#### LSA1 carriage dimensions
[](https://wiki.kurokesu.com/uploads/images/gallery/2020-08/4cFLSA1_carriage_details.png)
#### 3D model
Simplified 3D model is maintained on [GitHub repository](https://github.com/Kurokesu/3d_models)# Wiring
#### RJ45 pinout
| **Pin** | **Signal** |
| 1 | GND |
| 2 | 5V |
| 3 | SIG1 |
| 4 | A1 |
| 5 | A2 |
| 6 | SIG2 |
| 7 | B1 |
| 8 | B2 |
SIG1 is used for homing signal
# Drive train specifications
#### Lead screw
LSA1 can be fitted with different spring loaded lead screws
| **Parameter** | **Pitch**
**0.635mm**
| **Pitch**
**1.27mm**
| **Pitch**
**6.35mm**
| **Unit** |
| Push pull force | >50 | >40 | TBD | N |
| Backlash | 5 | TBD | TBD | µm |
#### Motor
| **Parameter** | **Value** | **Unit** |
| Size | NEMA11 | |
| Step angle | 1.8 ±5% | deg |
| Phase count | 2 | |
| Rotor inertia | 12 | g\*cm2 |
| Mass | 180 | g |
| Rated voltage | 4.5 | V |
| Rated current | 0.75 | A |
| Resistance per phase | 6.7 ±10% | Ω |
| Inductance per phase | 3 ±20% | mH |
| Holding torque | 95 | mN\*m |
# GRBL motion settings
#### Recommended GRBL parameters
Motion controller needs to know about actuator capabilities.
Assume motor is connected to Y axis.
#### LSA1 pitch 0.635mm
| **GRBL parameter** | **Value** | **Definition** |
| $101 | 10078.740158 | Y steps/mm |
| $111 | 250.000 | Y Max rate, mm/min |
| $121 | 40.000 | Y Acceleration, mm/sec2 |
| $131 | 90.000 | Y Max travel, mm |
#### LSA1 pitch 1.27mm
| **GRBL parameter** | **Value** | **Definition** |
| $101 | 5039.37008 | Y steps/mm |
| $111 | 500.000 | Y Max rate, mm/min |
| $121 | 50.000 | Y Acceleration, mm/sec2 |
| $131 | 90.000 | Y Max travel, mm |
#### LSA1 pitch 6.35mm
| **GRBL parameter** | **Value** | **Definition** |
| $101 | 1007.87402 | Y steps/mm |
| $111 | 2500.000 | Y Max rate, mm/min |
| $121 | 300.000 | Y Acceleration, mm/sec2 |
| $131 | 90.000 | Y Max travel, mm |
#### Calculating steps/mm constant
| **Variable** | **Value** | **Definition** |
| p | 6.35 | Lead screw pitch |
| s | 200 | Stepper motor steps per revolution |
| m | 32 | Microstepping |
**const = 1/(p\*s\*m)**# Ordering
LSA1 linear actuator can be ordered directly on [Kurokesu e-store](https://www.kurokesu.com/shop/motion_systems)