# RSB1
# Overview
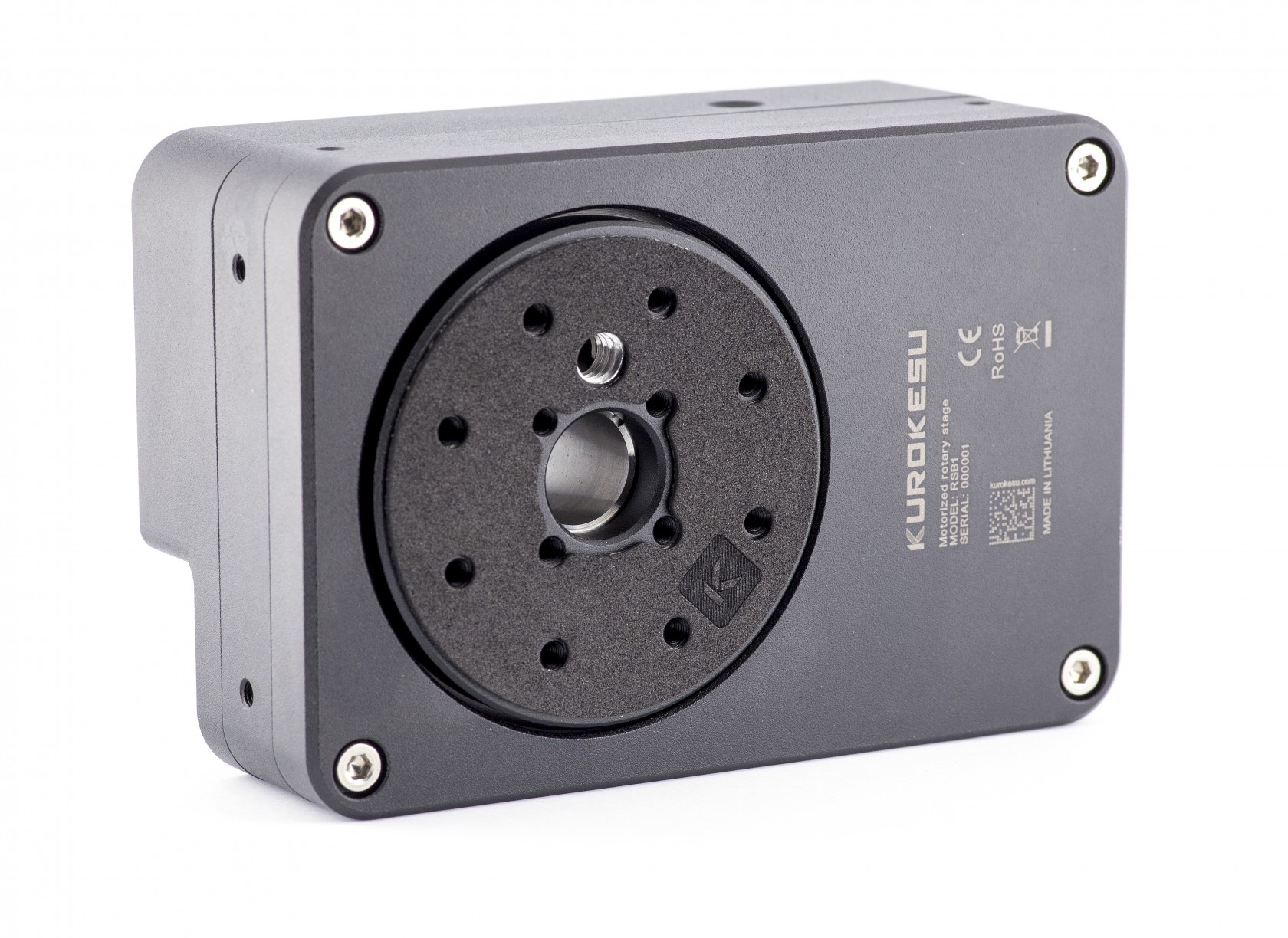
Universal lightweight motorized rotary actuator for automated 360° product photography
[](https://wiki.kurokesu.com/uploads/images/gallery/2021-02/IMG_0584_.jpg)
- Black anodized aluminium
- Modular construction
- GT2 belt drive for smooth operation
- Double preloaded instrumentation bearings zero backlash
- 12.7mm through hole for wire harness or slip-ring
- Magnetic Hall sensor for precise homing
- Reduction ratio 1:5# Specifications
| **Parameter** | **Value** | **Units** |
| Reduction ratio | 5:1 | |
| Stepper motor step angle | 1.8 | deg |
| Motor current | 1 | A |
| Rotary stage max torque | 0.5 | Nm |
| Weight | 475 | g |
| Slewing hole diameter | 12.7 | mm |
| Radial load | >20 | N |
| Axial load | >100 | N |
# How to start using
#### Start program
- Connect actuator to port A
- Connect cables (USB and power)
TBD: picture
- Install serial port driver if needed [STM32 Virtual COM Port Driver](https://www.st.com/en/development-tools/stsw-stm32102.html)
- Download latest Windows release from [GitHub](https://github.com/Kurokesu/RSB1_360_product_photography)
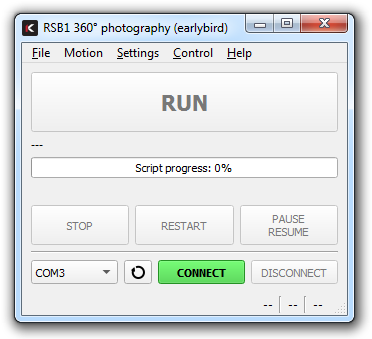
- Extract zip file and run **RSB1\_360\_photography** program
- You should be greeted with window
[](https://wiki.kurokesu.com/uploads/images/gallery/2020-08/main_window.png)
- Select COM port and press CONNECT
- Status bar at the bottom should tell controller status and version. Or error message will pop
#### Move actuator
- TBD: load program
- TBD: create custom program
- TBD: screenshot
- Run
#### Video
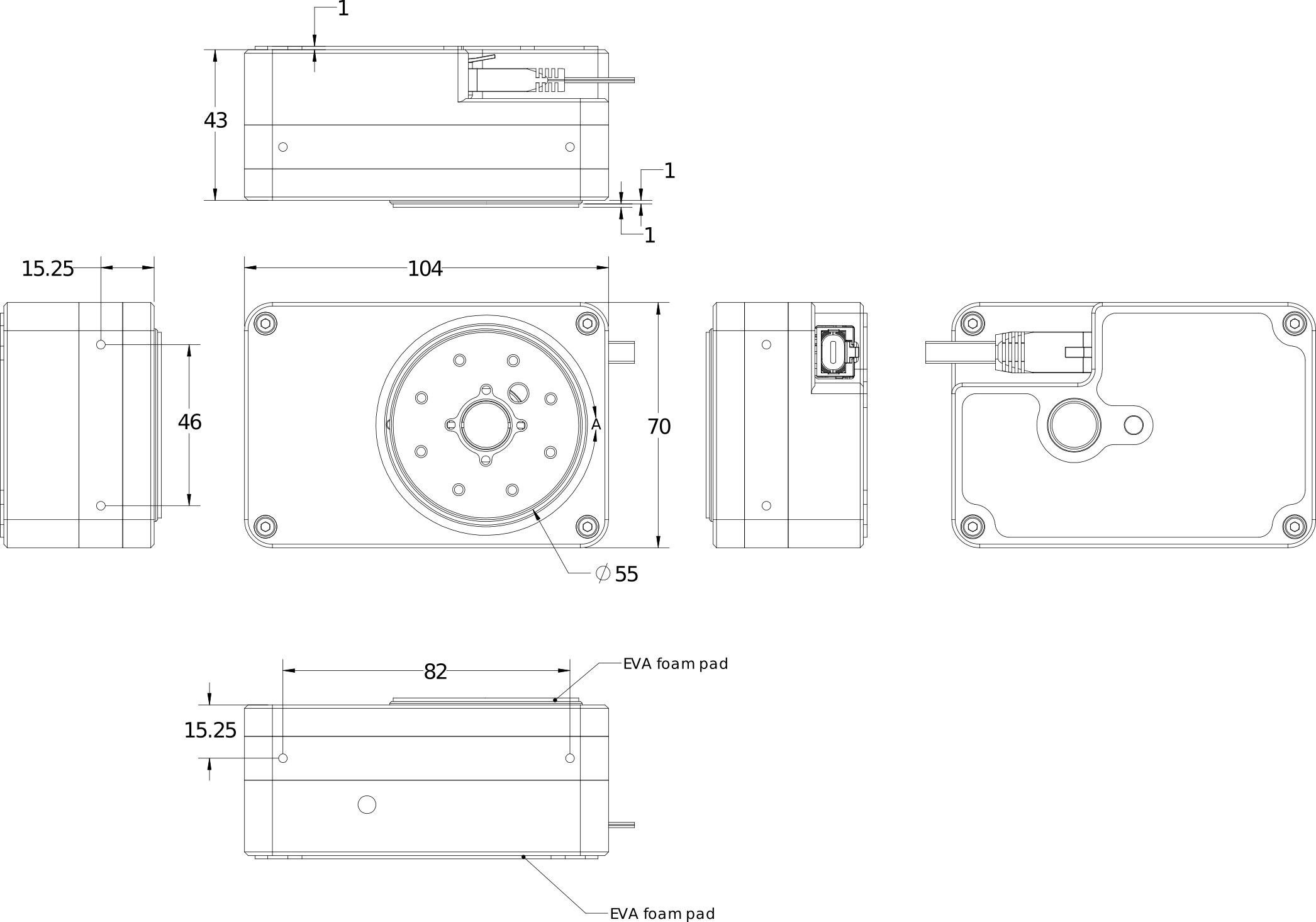
TBD: quick step-by-step video# Dimensions
RSB1 dimensions
[](https://wiki.kurokesu.com/uploads/images/gallery/2020-08/RSB1_dimensions.png)
Detailed platform dimensions
[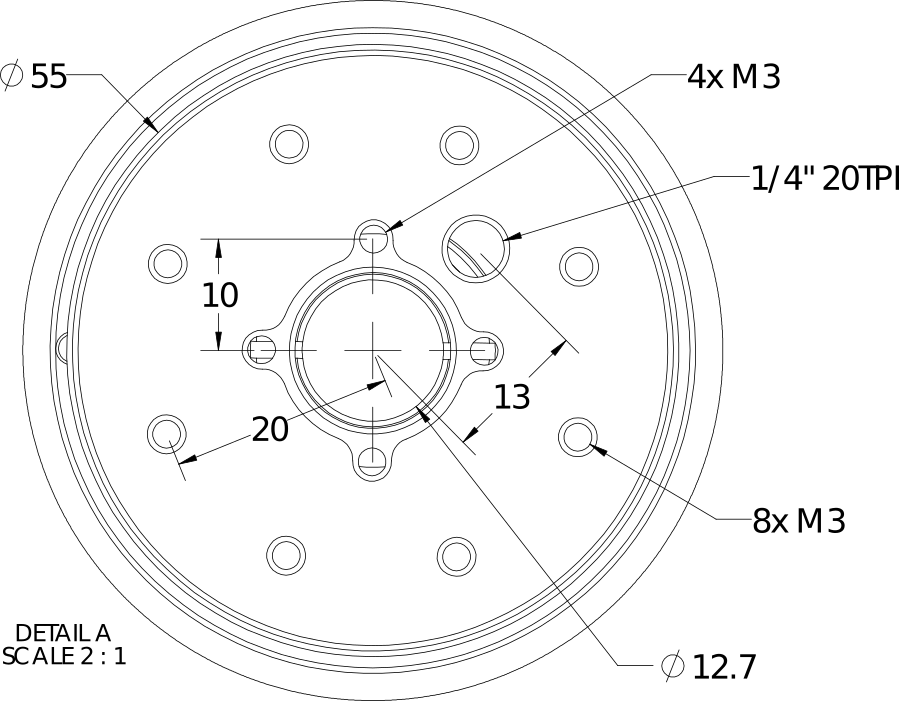](https://wiki.kurokesu.com/uploads/images/gallery/2020-08/RSB1_platform.png)# Wiring
#### RJ45 pinout
| **Pin** | **Signal** |
| 1 | GND |
| 2 | 5V |
| 3 | SIG1 |
| 4 | A1 |
| 5 | A2 |
| 6 | SIG2 |
| 7 | B1 |
| 8 | B2 |
SIG1 is used for homing signal
# Drive train specifications
#### Belt reducer
RSB1 has GT2 belt in order to transfer power to plate. 12/60 tooth pulleys provide 1:5 reduction rate.
#### Motor
| **Parameter** | **Value** | **Unit** |
| Size | NEMA17 | |
| Step angle | 1.8 ±5% | deg |
| Phase count | 2 | |
| Mass | 150 | g |
| Rated voltage | 3.5 | V |
| Rated current | 1.0 | A |
| Resistance per phase | 3.5 ±10% | Ω |
| Inductance per phase | 4.5 ±20% | mH |
| Holding torque | 160 | mN\*m |
| **GRBL parameter** | **Value** | **Definition** |
| $100 | 111.110 | X steps/mm |
| $110 | 20000.000 | X Max rate, mm/min |
| $120 | 2000.000 | X Acceleration, mm/sec2 |
| $130 | 90.000 | X Max travel, mm |
Assume motor is connected to X axis.
# Ordering
**RSB1** rotary actuator can be ordered directly on [Kurokesu e-store](https://www.kurokesu.com/shop/motion_systems)