# SCE2-MOTION
# Overview
**SCE2-MOTION** is a compact controller designed for robotic photography, controls [motor actuators](https://wiki.kurokesu.com/shelves/motion-actuators), and triggers DSLR camera. It is based on 4 channel stepper motor controller [SCE2-M](https://wiki.kurokesu.com/books/sce2) module. The controller is running open-source [GRBL firmware](https://github.com/Kurokesu/SCE2-GRBL) capable of advanced scripting and complex movements.
[](https://wiki.kurokesu.com/uploads/images/gallery/2020-08/IMG_0570_r.jpg)# Dimensions
Compact design with extra heat dissipation capabilities.
- Dimensions: 64 x 58 x 16.5mm
- Weight: 87g
[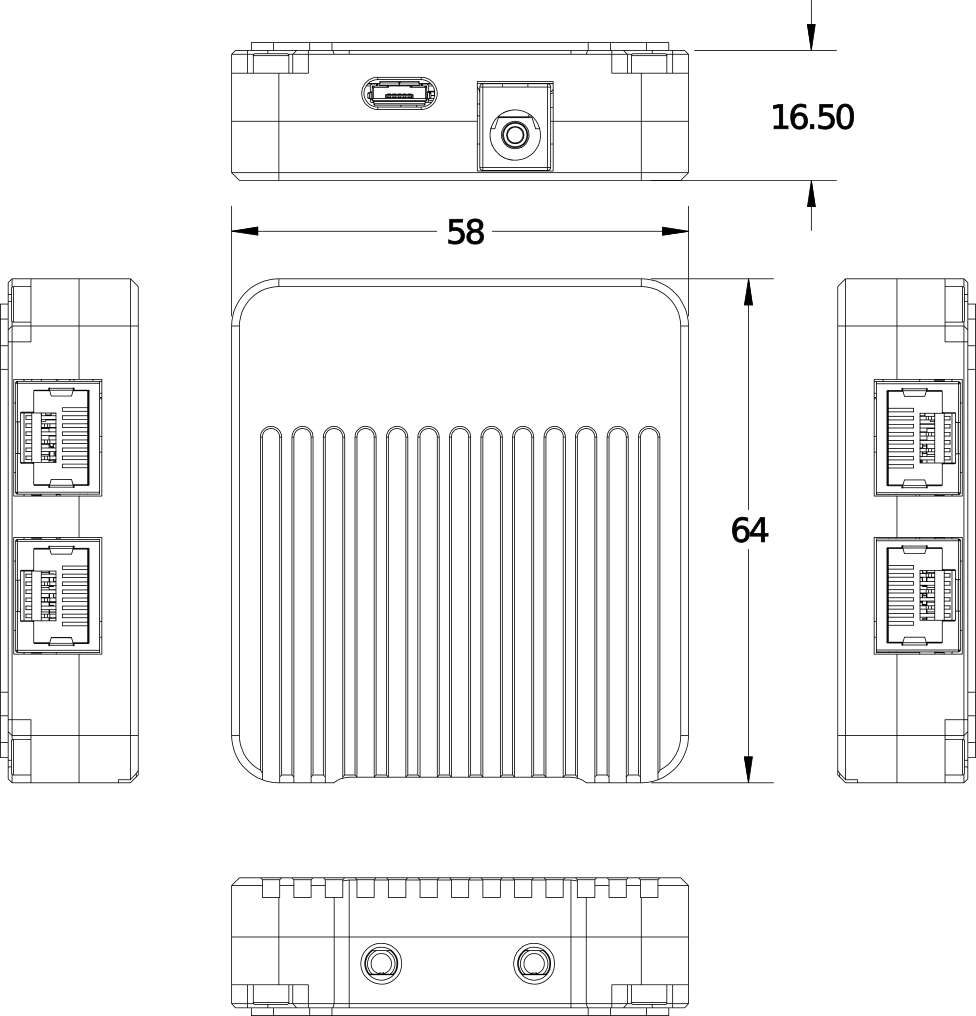](https://wiki.kurokesu.com/uploads/images/gallery/2020-08/LP0614_MOTION_ENCLOSURE_dimensions.png)# Control software
**SCE2-MOTION** can be controlled by any G-code sender like [Candle](https://github.com/Denvi/Candle), [Universal-G-Code-Sender](https://github.com/winder/Universal-G-Code-Sender), and many more. Most of these software packages lack the g-code generator part. So highly specialized open-source programs had to be created from scratch.
#### RSB1 360 product photography
- Source code on [GitHub](https://github.com/Kurokesu/RSB1_360_product_photography)
- Windows releases also on [GitHub](https://github.com/Kurokesu/RSB1_360_product_photography/releases)
- [More details](https://wiki.kurokesu.com/books/motion-control-software) about motion control software
Code is written with Python it can be run on any modern operating system, even Raspberry Pi# Default GRBL settings
Each actuator combination needs individual settings to be fine tuned. Below settings are for:
- [**RSB1**](https://wiki.kurokesu.com/books/rsb1) connected to X axis
- [**LSA1**](https://wiki.kurokesu.com/books/lsa1) connected to Y axis
[GRBL settings](https://github.com/gnea/grbl/wiki/Grbl-v1.1-Configuration) for fastest speed under light load:
```shell
$0=6
$1=255
$2=0
$3=31
$4=1
$5=0
$6=0
$10=19
$11=0.010
$12=0.002
$13=0
$20=0
$21=0
$22=1
$23=15
$24=50.000
$25=200.000
$26=250
$27=5.000
$30=1000
$31=0
$32=0
$100=111.110
$101=5039.370
$102=111.110
$103=111.110
$110=20000.000
$111=2000.000
$112=20000.000
$113=20000.000
$120=2000.000
$121=100.000
$122=2000.000
$123=2000.000
$130=360.000
$131=90.00
$132=360.000
$133=360.000
```# Firmware
Firmware is [open-source GRBL](https://github.com/Kurokesu/SCE2-GRBL) based running on STM32 microcontroller.# Schematics
#### SCE2-M module
[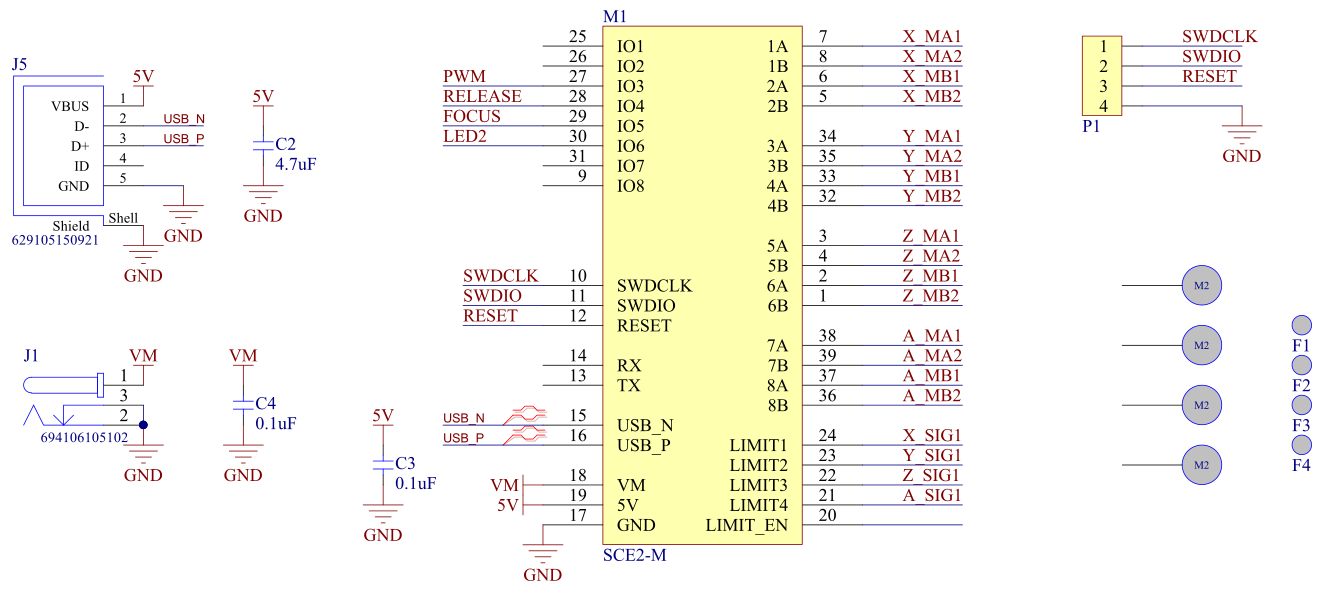](https://wiki.kurokesu.com/uploads/images/gallery/2020-09/p3.png)
#### DSLR control headers
SCE2-MOTION has 4 outputs available. Controller is shipped with connected optocoupers (safe to connect to expensive DSLR camera). But for ease of customization control signals can be wired directly. See not populated resistors.
[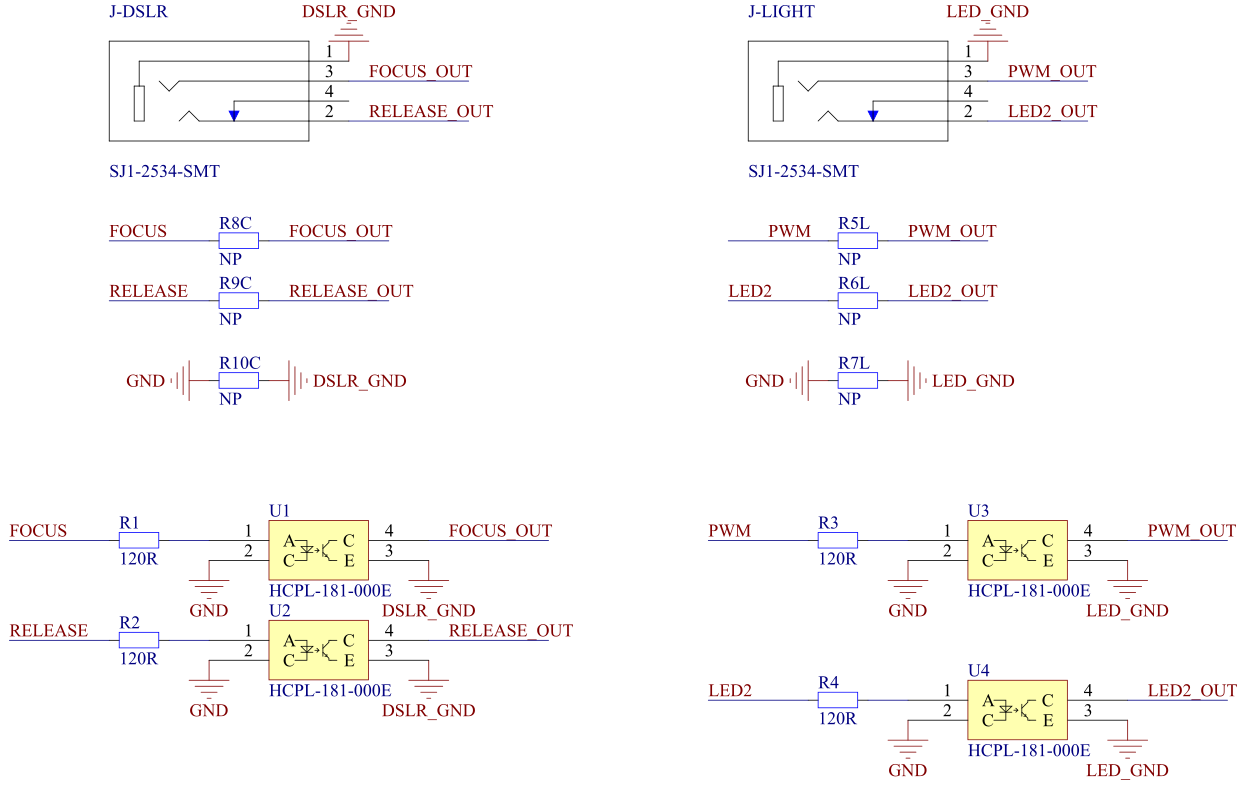](https://wiki.kurokesu.com/uploads/images/gallery/2020-09/p2.png)
#### Motor RJ45 headers
[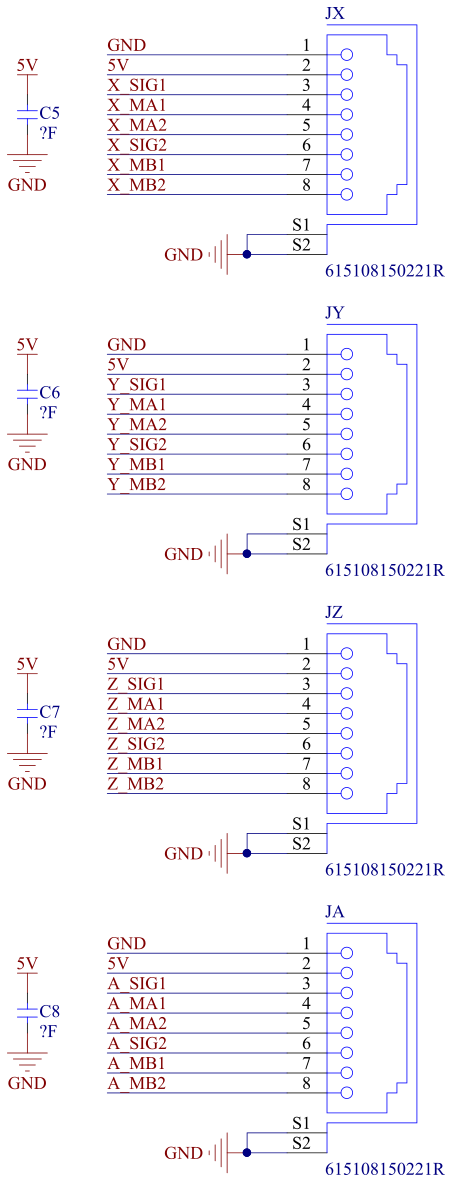](https://wiki.kurokesu.com/uploads/images/gallery/2020-09/p1.png)
#### Top PCBA view
[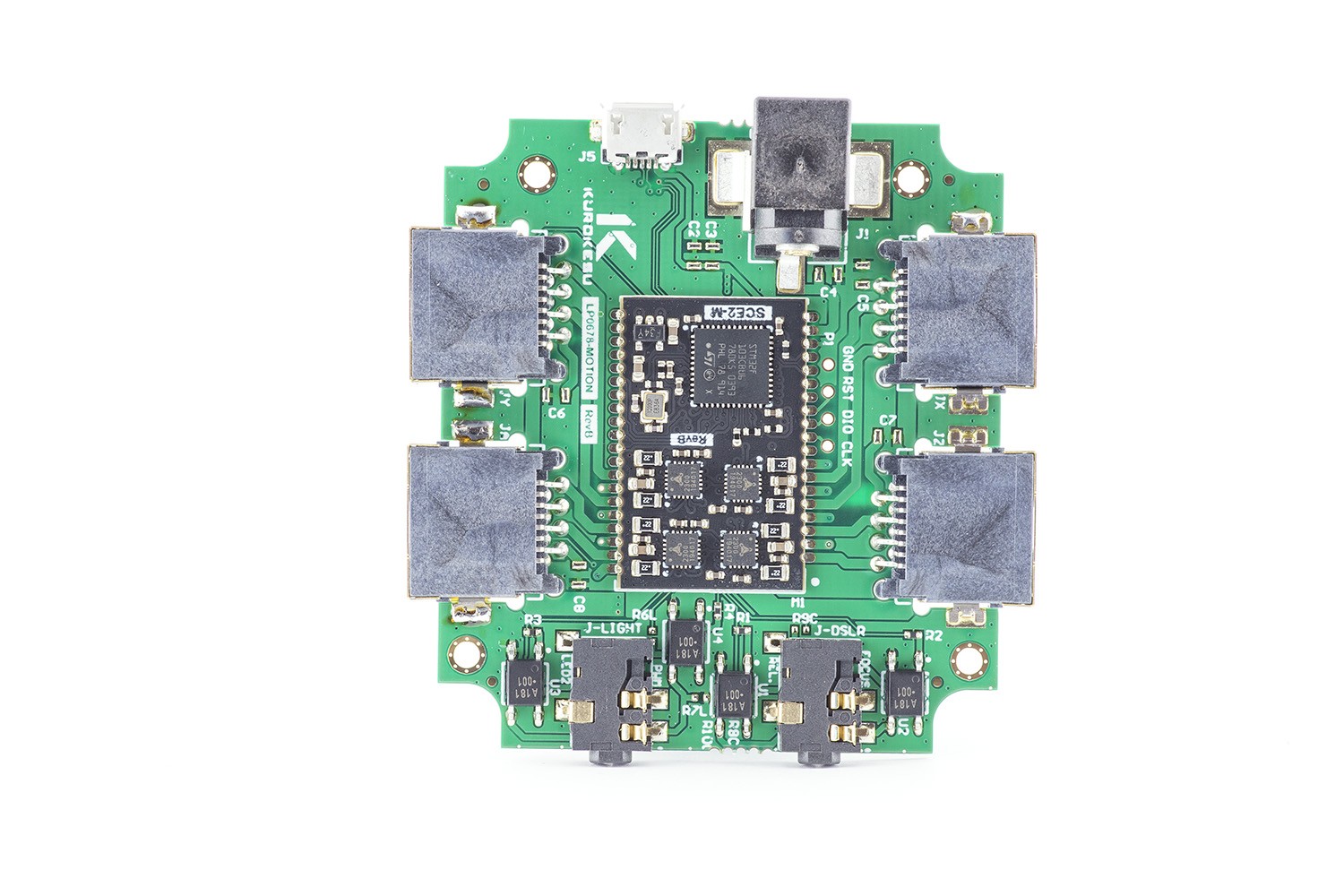](https://wiki.kurokesu.com/uploads/images/gallery/2020-09/Kurokesu-SCE2_motion.jpg)# Power supply
Controller can drive up to 1.2A per channel, thus max power demand when all 4 motors are driven at 100% power will not exceed 5A @ 9V DC.